MEET P.I.G.E.O.N
Nautilus’s AUV is named P.I.G.E.O.N. Visit the different sections (electrical, mechanical, and software) to learn more about its design.
The technical report of the submarine designed as part of the competition is available below.
In this section, you can learn more about:
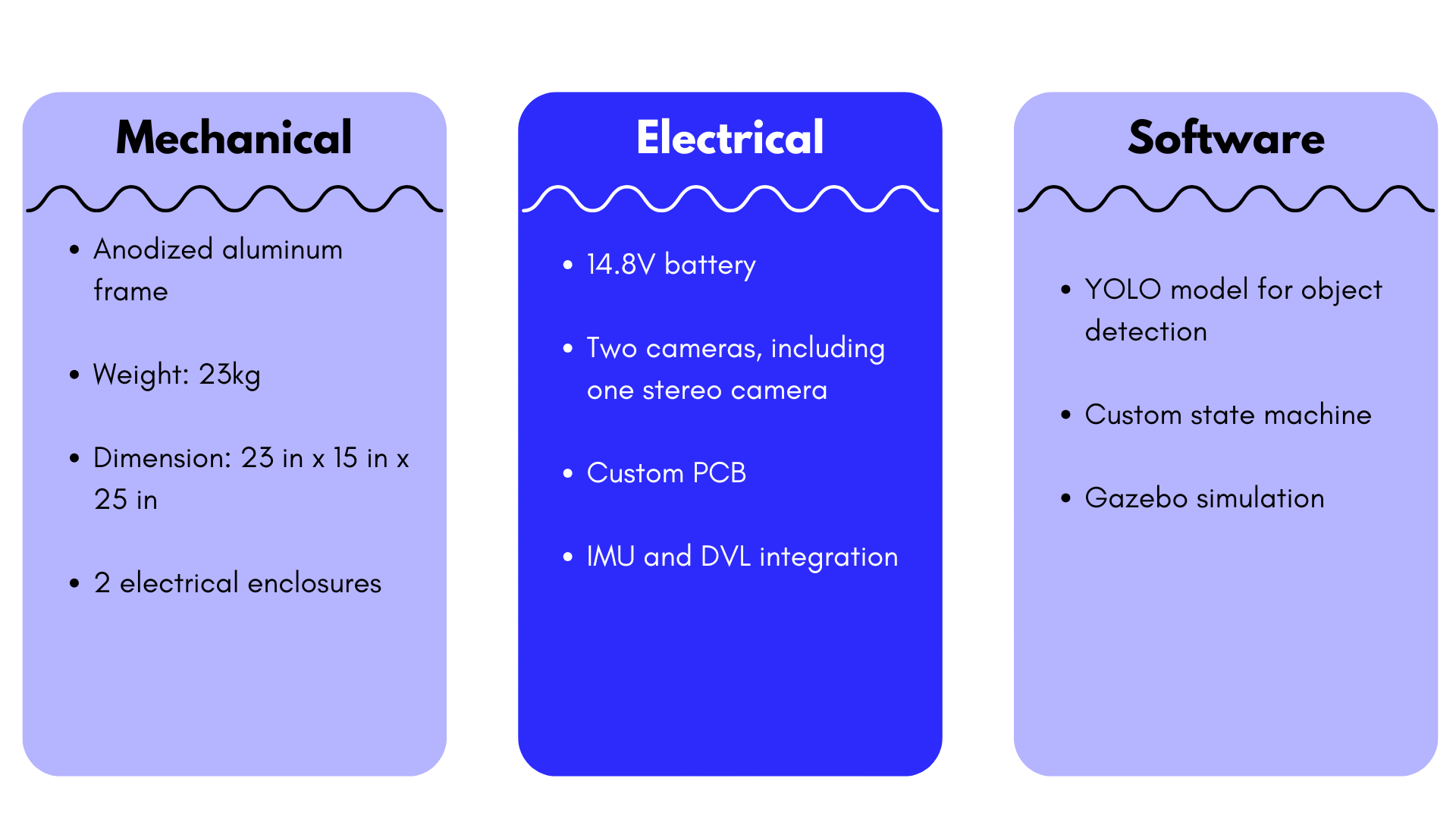
The mechanical assembly of the sub
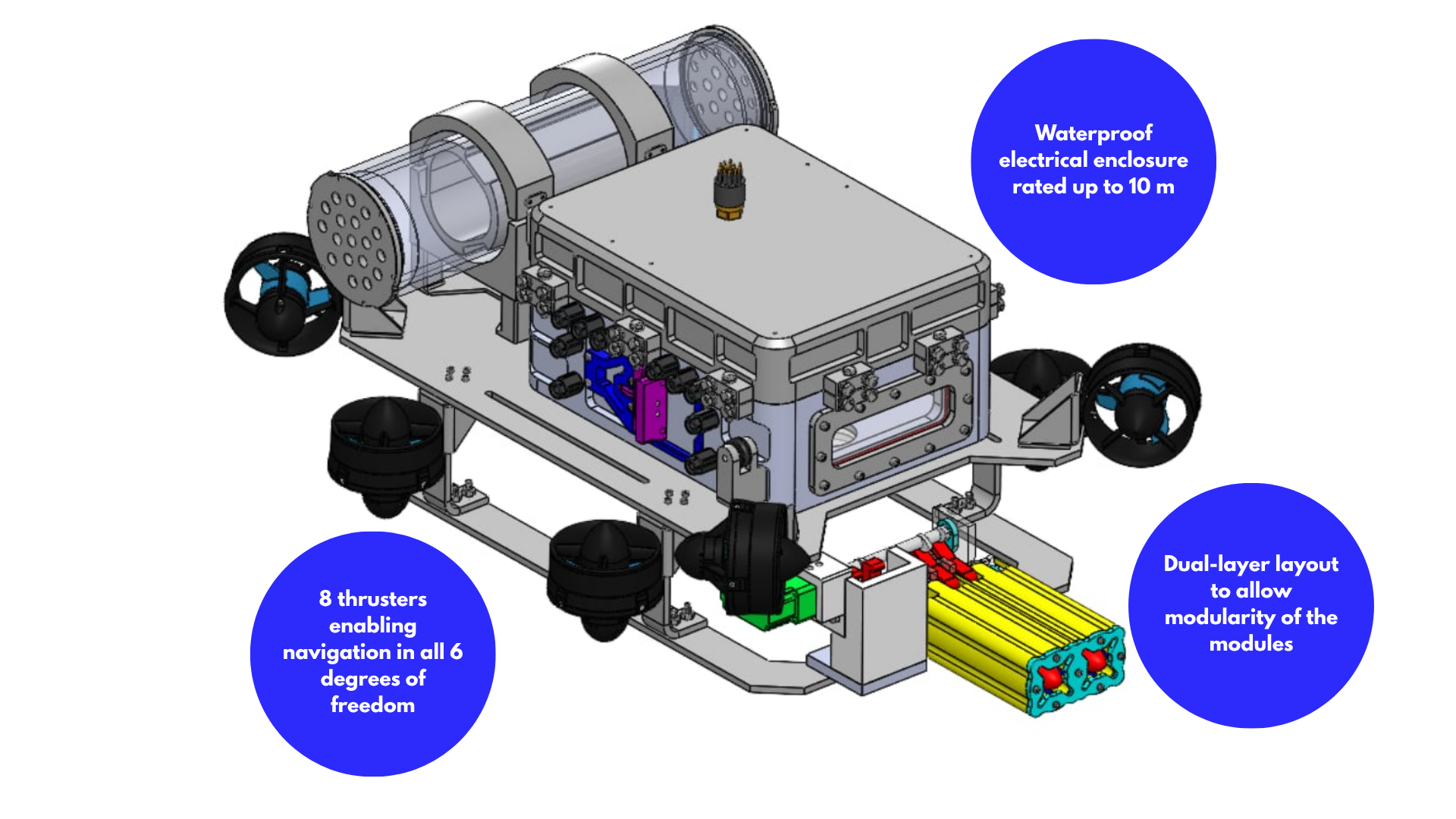
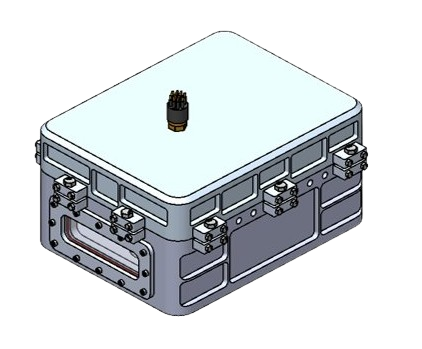
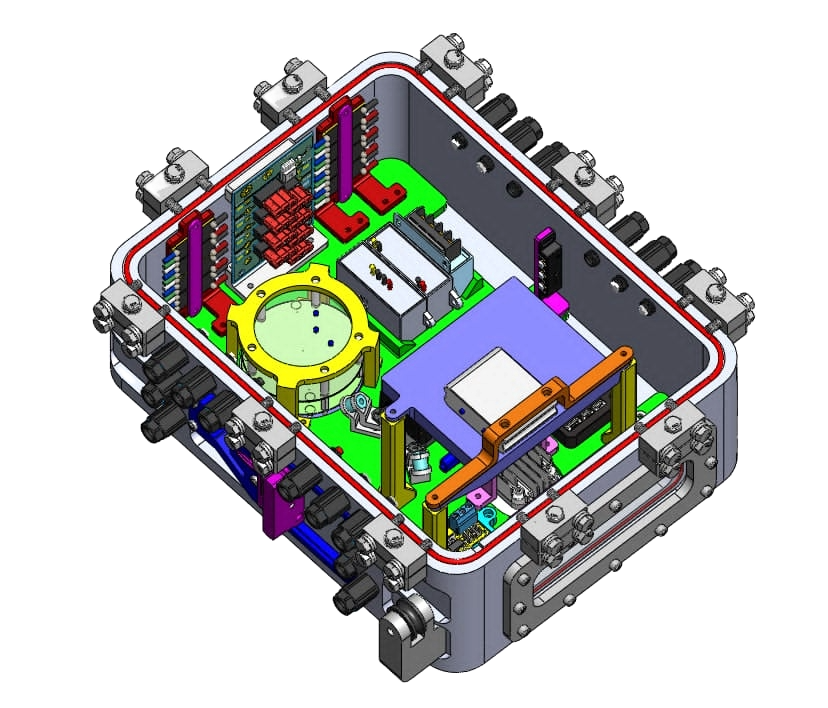
The custom electrical enclosure
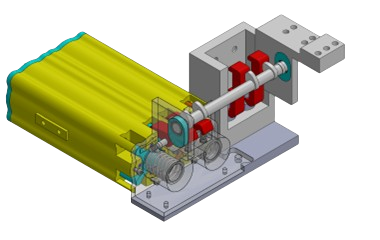
The torpedo and dropper subsystems
MECHANICAL
ELECTRICAL
In this section, you can learn more about:
The electrical assembly of the sub
The electrical design for the different parts of the sub
The custom PCBs inside the sub
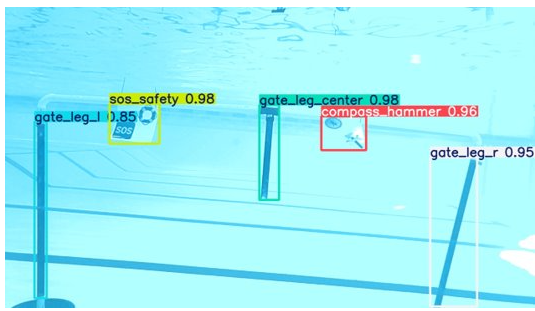
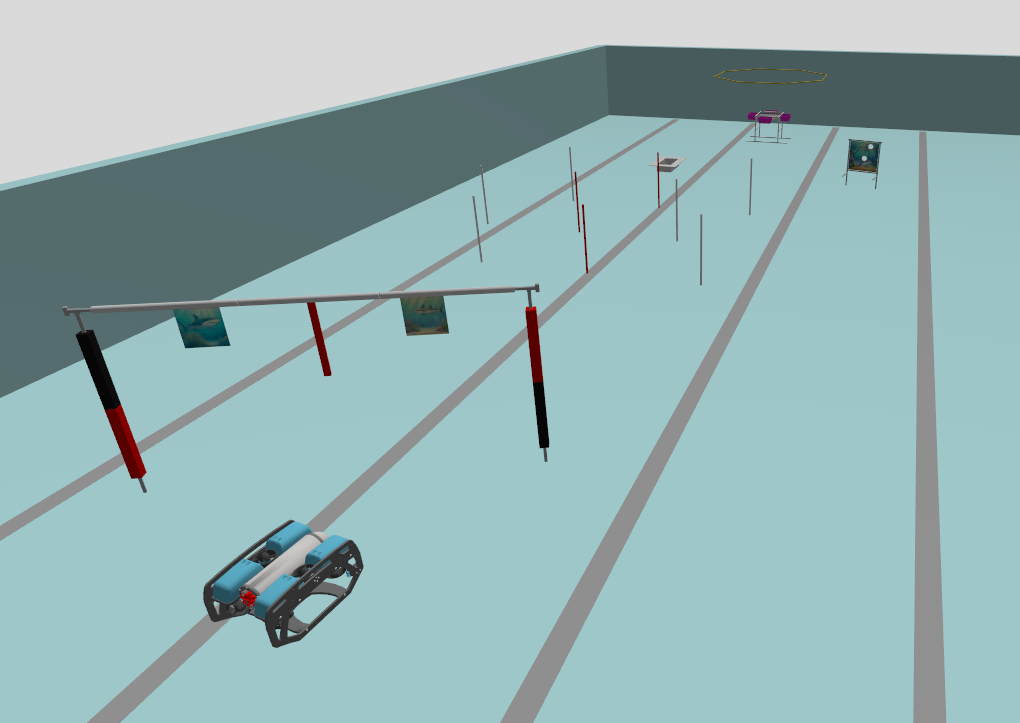
In this section, you can learn more about:
The simulation for practice runs
The YOLO model for object detection
The custom state machine
SOFTWARE